BT200L机器人
优化的车身车间机器人
B系列的车身车间机器人是采用川崎公司成熟先进的技术和丰富的自动化行业经验进行开发的,把性能提升到了一个新的水平。坚固而轻便的超薄设计满足了对功能性、灵活性和投资效率优化的追求,以***大限度地实现点焊的效力和多用途使用。
BT200L机器人概述:
负载200 kg
臂展3,151 mm
应用:
- 装配
- 摩擦点接合
- 机器管护
- 物料搬运
- 材料去除
- 涂胶
- 点焊
-
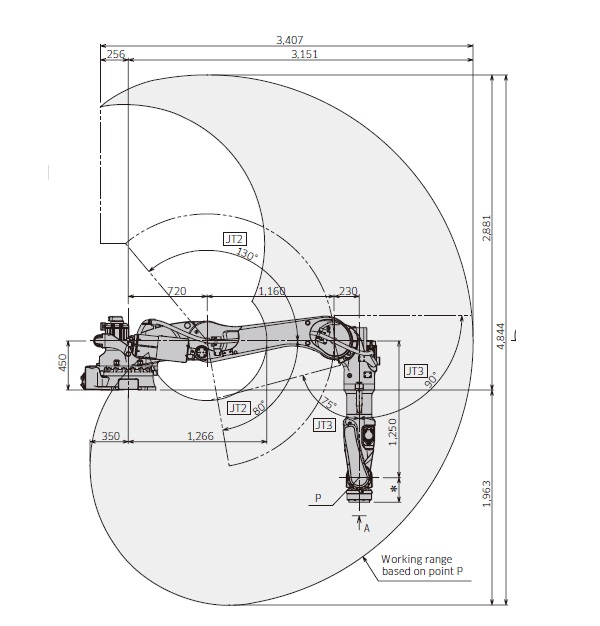
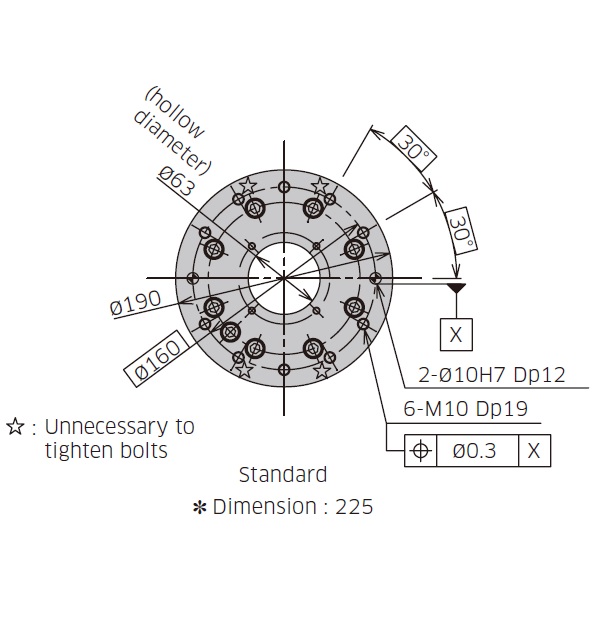
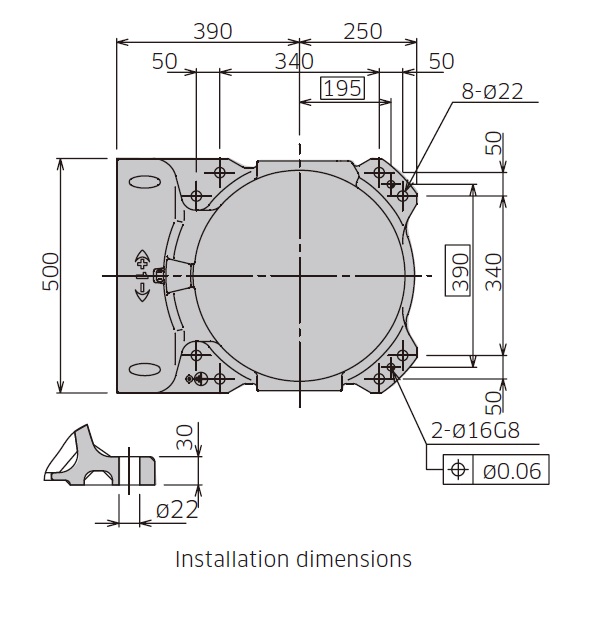
动作范围与尺寸
点击下面的图片来查看。图中所示尺寸单位为毫米(mm)。
BT200L机器人的规格
BT200L的规格 手臂类型 多关节型机器人 自由度 (轴) 6 负载能力 (kg) 200 臂展 (mm) 3,151 重复定位精度 (mm)✽1 ±0.08 动作范围 (°) 手臂旋转 (JT1) ±160 手臂前后 (JT2) +80 - -130 手臂上下 (JT3) +90 - -75 手腕旋转 (JT4) ±210 手腕弯曲 (JT5) ±125 手腕扭转 (JT6) ±210 速度 (°/s) 手臂旋转 (JT1) 105 手臂前后 (JT2) 85 手臂上下 (JT3) 100 手腕旋转 (JT4) 120 手腕弯曲 (JT5) 120 手腕扭转 (JT6) 200 允许负载扭矩 (N•m) 手腕旋转 (JT4) 1,334 手腕弯曲 (JT5) 1,334 手腕扭转 (JT6) 588 允许负载惯量 (kg•m2) 手腕旋转 (JT4) 199.8 手腕弯曲 (JT5) 199.8 手腕扭转 (JT6) 154.9 重量 (kg) 1,100 安装方式 支架 安装条件 环境温度 (°C) 0 - 45 相对湿度 (%) 35 - 85 (无结露) 控制柜 / 所需电源 (kVA)
E02 / 7.5 保护等级 手腕 : IP67同等 基座 : IP54同等 ✽1: 以ISO9283为基准。
-