

R系列机器人为所有小中型工业机器人设定了基准。紧凑的设计和杰出的速度、伸展距离和工作范围使R系列机器人适用于遍及众多不同行业的广泛应用范围。
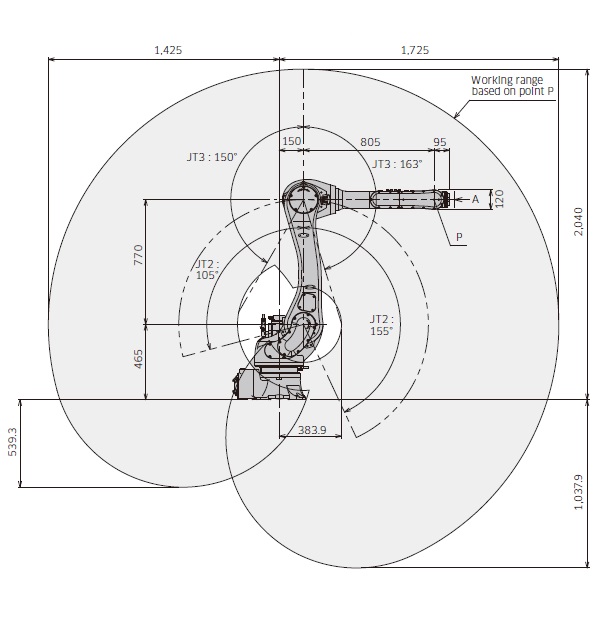
动作范围与尺寸
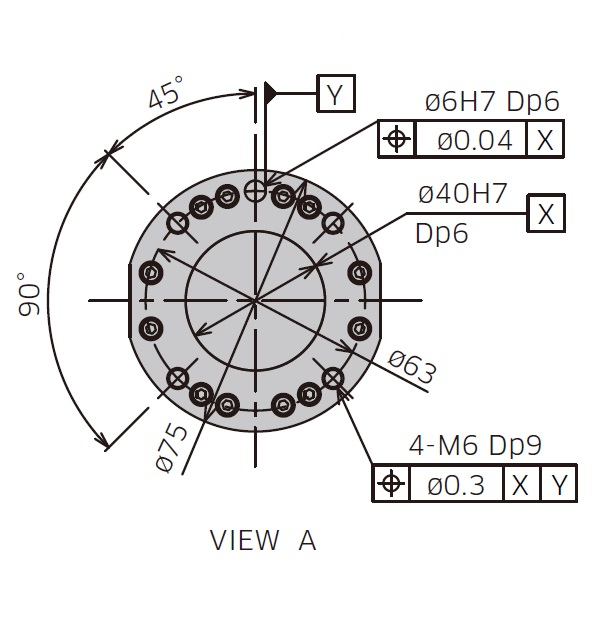
点击下面的图片来查看。图中所示尺寸单位为毫米(mm)。

RS020N的规格
| RS020N的规格 | |||
| 手臂类型 | 多关节型机器人 | ||
|---|---|---|---|
| 自由度 (轴) | 6 | ||
| 负载能力 (kg) | 20 | ||
| 臂展 (mm) | 1,725 | ||
| 重复定位精度 (mm)✽1 | ±0.04 | ||
| 动作范围 (°) | 手臂旋转 (JT1) | ±180 | |
| 手臂前后 (JT2) | +155 - -105 | ||
| 手臂上下 (JT3) | +150 - -163 | ||
| 手腕旋转 (JT4) | ±270 | ||
| 手腕弯曲 (JT5) | ±145 | ||
| 手腕扭转 (JT6) | ±360 | ||
| 速度 (°/s) | 手臂旋转 (JT1) | 190 | |
| 手臂前后 (JT2) | 205 | ||
| 手臂上下 (JT3) | 210 | ||
| 手腕旋转 (JT4) | 400 | ||
| 手腕弯曲 (JT5) | 360 | ||
| 手腕扭转 (JT6) | 610 | ||
| 允许负载扭矩 (N•m) | 手腕旋转 (JT4) | 45 | |
| 手腕弯曲 (JT5) | 45 | ||
| 手腕扭转 (JT6) | 29 | ||
| 允许负载惯量 (kg•m2) | 手腕旋转 (JT4) | 0.9 | |
| 手腕弯曲 (JT5) | 0.9 | ||
| 手腕扭转 (JT6) | 0.3 | ||
| 重量 (kg) | 230 | ||
| 安装方式 | 地面, 悬挂 | ||
| 安装条件 | 环境温度 (°C) | 0 - 45 | |
| 相对湿度 (%) | 35 - 85 (无结露) | ||
|
控制柜 / 所需电源 (kVA) |
E01 / 5.6 | ||
| 保护等级 | 手腕: IP67同等 基座: IP65同等 | ||
✽1: 以ISO9283为基准。